Conquering the Pacific
At just 11 feet, Seasats’ uncrewed Lightfish is conquering 7,000+ miles of unforgiving Pacific waters, pushing modern nautical operations to new limits. Already having sailed over 2,500 miles in 10 weeks to the shores of Honolulu, Lightfish Hull 36 is set to continue its lone voyage across the Pacific in what truly is a monumental feat of mechanical endurance and engineering capability. Broadcasting live with DeepWater Exploration’s exploreHD cameras and advanced sensors from a selection of 35+ payloads, the Lightfish is able to transmit real-time data throughout multi-month missions, displaying the potential of solar-driven autonomy in vast, unpredictable waters. As Hull 36 nears Japan, it ushers in an era where the ocean no longer relies on captains, but rather cutting-edge technology.
Engineering Autonomy: The Lightfish Story

Though now West Coast-based, Seasats traces its roots to Rhode Island, known as the “sailing capital of the world” for its maritime history. Amid the salty air, childhood friends Mike Flanigan, Max Kramers, and Dylan Rodriguez — all future engineers with a passion for sailing — joked about the idea of sending a “message in a bottle” across the Atlantic to Spain. What initially seemed like a far-fetched idea quickly gained lots of support, and in 2013 the team developed their first prototype vessel, the SCOUT.
The prototype went on to set a record for distance traveled by an uncrewed vessel, but unfortunately never reached Spain, going offline after 1,300 miles (incidentally, very close to where the Titanic sank). Even then, the story gained media attention, revealing rising demand for uncrewed vessels among researchers and maritime industries.
Nearly a decade later, Seasats was founded in San Diego, a thriving hub of naval innovation with Pacific access. The core mission remained the same: automating ocean operations beyond human limits.
After early iterations such as the X3 model, Seasats fine-tuned their design into today’s flagship model, the Lightfish. Over the last decade, with some help from various other technological advancements and market availability for key components such as solar cells, batteries, and microcontrollers, Seasats earned a prime position for mass production, opening the door for their autonomous fleets to reshape maritime operations.
The ASV Revolution

In recent years, global demand for autonomy has elevated autonomous surface vehicles (ASVs) like Seasats’ Lightfish as critical tools, catering to needs across commercial, scientific, and defense sectors with unparalleled efficiency compared to traditional crewed operations.
Commercially, ASVs like the Lightfish have transformed underwater surveying. What used to cost millions for a standard crewed vessel can now be efficiently completed at the fraction of the cost, enabling rapid mapping and accelerating development for subsea pipelines, cables, and offshore installations.
Scientifically, ocean data collection and weather monitoring have long relied on sensor buoys deployed across the globe. These fixed platforms, while effective, require expensive vessel deployments for installation and maintenance. The failure of a single buoy sensor can halt certain data collection and monitoring for weeks, overall inflating costs. By contrast, if the Lightfish experiences a sensor malfunction, it could autonomously return to port, minimizing downtime and expenses for repair.
Defense is what truly underscores the urgent demand for ASVs. The Russia-Ukraine conflict has already highlighted a shift in warfare with widespread usage of aerial drones, and the same is occurring on the naval front. Just last month, $250,000 Ukrainian-developed USVs, Magura V5s, were used to sink a $65 million Russian patrol vessel, the Sergei Kotov. Although it’s unclear if the Magura V5s were operating fully autonomously, the cost disparity is catching global attention.
Outside of that theater, announcements like China’s deep-sea crewed vehicle, which claims to be capable of targeting undersea cables, highlight a glaring vulnerability. These cables transmit 95% of worldwide internet data and are installed across all oceans. With our oceans spanning over 130 million square miles, complete surveillance is a nearly impossible task for crewed fleets. ASVs like the Lightfish bridge this gap through a scalable network, or a constellation, of autonomous vessels providing continuous monitoring. Outfitted with rugged exploreHD cameras, the Lightfish allows one operator to have eyes all over a region, or around critical infrastructure such as ports, rigs, and subsea cables.
Preparing for Autonomous Voyage

A multi-month voyage across the Pacific’s expanse requires exceptional design and execution from the Seasats team. For Lightfish Hull 36 to autonomously sail from San Diego to Japan, key challenges include mechanical fatigue, power consumption, unpredictable weather, and sensor reliability. Each factor puts the vessel’s endurance to the test, and Seasats addresses each one with a mix of innovative design and pre-launch testing.
Throughout the mission, the structural integrity of the Lightfish is put under relentless stress with each impact of a wave it endures. Over a long voyage, the Lightfish and its payloads must remain structurally sound and resist the cyclic stress of thousands of these impacts. Equipped with a composite hull, which has the added benefit of saltwater corrosion resistance over metal, the lightweight design is able to absorb the shock of a wave by slightly flexing upon impact, dissipating energy without permanent deformation. Prior to launch, Seasats stress-tests components and full hulls, monitoring telemetry to ensure the hull and payloads hold firm.
For power on long voyages, the Lightfish relies on solar panels to recharge its 4 kWh onboard batteries. For cloudy days and power-hungry payloads, it is equipped with an onboard generator which can extend its no-solar range to 575+ nautical miles. Additionally, a low-power mode can be enabled, throttling non-critical systems while prioritizing propulsion and navigation. During testing, the Seasats team fine-tunes the balance of power modes to extend the range of the Lightfish to its full potential.
Although the Seasats team studies NOAA weather patterns to optimize their voyages, weather over the Pacific is notoriously erratic, and forecasts across the entire ocean are imprecise. To survive, the Lightfish must be able to react to its environment and make real-time decisions. Equipped with onboard weather sensors, the Lightfish is able to detect wind spikes or pressure drops, giving operators insights into current conditions and the option to steer away from storms. If caught in a storm, the self-righting vehicle, rated to Beaufort Sea State 6, is able to flip itself back upright in the case of capsizing.
Operating sensors like the exploreHD cameras and weather gauges for 100+ days strains reliability. A single failure could compromise one of the core mission purposes of data collection, so reliability is top priority. Redundancy is utilized to mitigate these points of failure as duplicate weather and sonar units are built into the Lightfish as backups. Multiple exploreHD cameras from DeepWater Exploration are used in the same manner as well. Engineered for endurance with corrosion resistant housings, the exploreHD cameras are mounted on the Lightfish above and below the water surface line, providing consistent and reliable vision for the vehicle.
Vision for the Uncrewed: The exploreHD

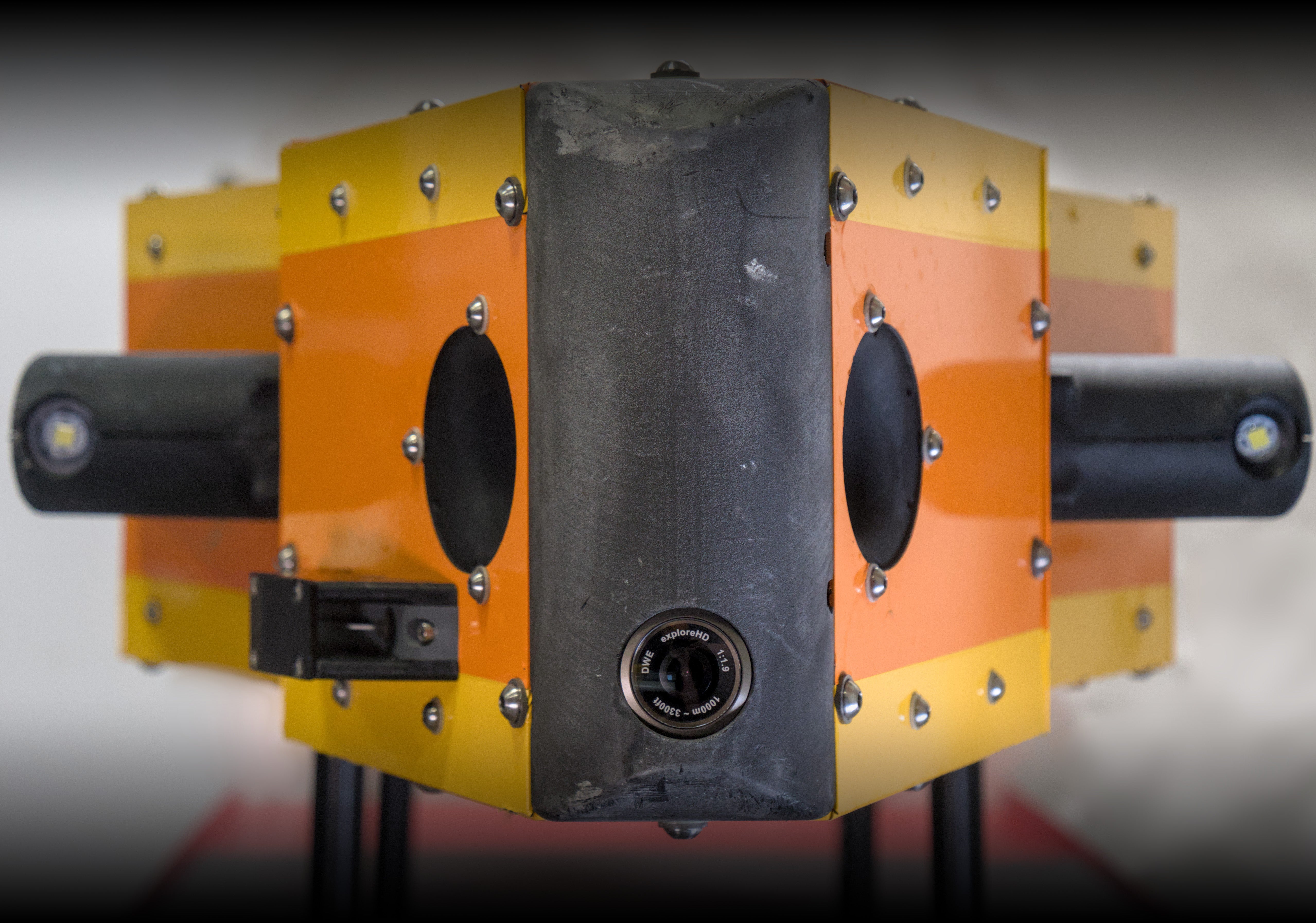
For Seasats, integrating a reliable vision system capable of enduring the demands of a trans-oceanic voyage was a critical design element for the Lightfish. They found the ideal solution with DeepWater Exploration’s exploreHD cameras, noting that their marinized design, compact form factor, and reasonable pricing addressed key requirements for their vehicle.
The integration process itself proved to be simple and straightforward, allowing for quick installation whether mounted above and below the waterline. During missions, the cameras on the Lightfish serve vital functions: those mounted above water provide essential situational awareness for detecting other vessels and obstacles, while the underwater cameras are used for observing marine life, and more crucially, monitoring the hull and propeller for biofouling, debris strikes, and entanglements during extended missions.
“DWE exemplifies how disruptive tech startups can create positive changes. They’re easy to work with, and they make great products at a fraction of the price of existing maritime camera companies.”
- Seasats Team
By providing innovative camera technology, DWE not only enhances the Lightfish’s capabilities for ambitious missions like the trans-Pacific crossing but also accelerates Seasats’ ability to develop and deploy additional vehicles. This ease of integration, combined with cutting-edge performance, is key to advancing the boundaries of maritime autonomy and enabling scalable production.
The Great Pacific Voyage

In a determined repeat of last year’s mission, the Seasats team launched the first leg of Lightfish Hull 36's mission from the beaches of San Diego to autonomously sail 2,500+ miles to Honolulu.
Previously in 2024, the same mission led by the Hull 24 Lightfish accomplished the feat of reaching Hawaii, collecting 73 continuous days of operational data, followed by a successful demonstration of reconnaissance and surveillance capabilities at Joint Base Pearl Harbor-Hickam. Bound for Japan next, the Seasats team was aware of heightened risks facing peak typhoon season, yet continued with their marathon stress test. Unfortunately, Hull 24 was caught by one such typhoon, and despite transmitting several hours of weather data in 80+ mph winds and 18ft waves, the signal was eventually lost. Afterwards, the Seasats team determined a malfunctioning vent cover allowed water to breach the hull, sinking Hull 24 after a valiant fight.
Building on the lessons learned from Hull 24, Seasats has since reinforced the Lightfish’s design and refined its strategy for this Pacific crossing. While last year’s mission followed a direct path to Hawaii for simplicity, this voyage prioritizes efficiency by charting a southern route which mirrors traditional sailing passages. In doing so, this adjustment optimizes energy use and leverages favorable wind patterns over the long haul.

With these enhancements, Hull 36 has enjoyed largely smooth sailing and steady progress, recently achieving a notable milestone by crossing the international date line. As this piece is being written, the Lightfish is currently conducting an extended survey around Wake Island, which is part of the Pacific Remote Islands Marine National Monument. Renowned for its diverse marine life and coral reefs, the region offers a prime opportunity to highlight the Lightfish’s advanced data collection capabilities.
While operating near islands or shorelines, the only minor challenge encountered has involved managing birds that congregate on the upper deck. While entertaining to watch, the birds unfortunately pose a risk of fouling the solar panels. Fortunately, this is sufficiently counteracted by the panels’ self-cleaning capability near the waterline, and some strategically placed strings which help deter loitering.
Throughout the voyage, DWE’s integrated cameras continue to provide remarkable views of the underwater environment, allowing the Seasats team to observe significantly more marine life, including various fish and marine mammals. The ongoing stream of monitoring data powerfully underscores the capabilities of the Lightfish and its advanced integrated systems in challenging real-world conditions.
The Impact Beyond the Lens


For autonomous maritime operations in challenging environments, the durability and reliability of vision systems are paramount. DeepWater Exploration’s exploreHD cameras provide unmatched reliability through corrosion resistance and durable housing, built from anodized aluminum, effectively mitigating challenges like biofouling and sea spray throughout the voyage. Power efficiency is equally crucial.
Operating at a low power draw, typically around 1W while active, the cameras’ low power efficiency plays a significant role in the Lightfish’s extended mission endurance.
Beyond these performance factors, the cameras’ compact size and plug-and-play integration simplify mounting in various locations, allowing for comprehensive multi-camera coverage across the whole vehicle. With eyes all around, operators are able to monitor the horizon and every critical component in real-time. Furthermore, their scalable cost offers a distinct advantage over existing marine camera systems, making advanced vision accessible for widespread deployment.
“Their low power draw, price point, and size allows us to have 5x cameras on board when we used to have one”
- Seasats Team
The Road Ahead

The successful collaboration between Seasats and DeepWater Exploration highlights the benefits of local partnerships within a thriving marine robotics hub like San Diego. This synergy has been instrumental in the achievements and demonstrated endurance of the Lightfish, showcasing the potential of advanced autonomous surface vehicles. As Hull 36 continues its voyage, the Seasats team is focused on the next leg of the journey, involving collaboration with their partners in Japan, Hydro Systems Development (HSD) and Monozukuri Ventures. Afterwards, endurance missions will certainly continue for Hull 36 as it is expected to head south for further testing.
To stay updated on Hull 36’s ongoing journey, readers are encouraged to check-in with the livestream for daily updates, and to follow other Seasats channels like their LinkedIn page. For those interested in meeting the team in-person and seeing the Lightfish up close, Seasats is planning on attending the AUVSI XPONENTIAL 2025 tradeshow in Houston, Texas, from May 19-22, 2025. Exciting new developments may be announced, potentially including a new product tease — stay tuned for updates.
Looking ahead, both Seasats and DeepWater Exploration anticipate continued collaboration and developments to keep advancing the capabilities of autonomy in maritime space. With Hull 36 confidently tackling its current mission, ambitious ideas like autonomously circumnavigating the globe seem increasingly within reach.