
Core Software
DeepWater Desktop
Real-time 3D perception and subsea VSLAM, 30+ FPS point clouds, high-density depth maps, and a developer-ready SDK integration.
DeepWater Discovery
Low-latency, multi-camera streaming and recording software for ROV pilots and topside monitoring stations.
dweOS
Open-source camera configuration layer and interface with built-in API for seamlessly integrating DWE camera feeds into existing vehicle software stacks.
DeepWater Desktop
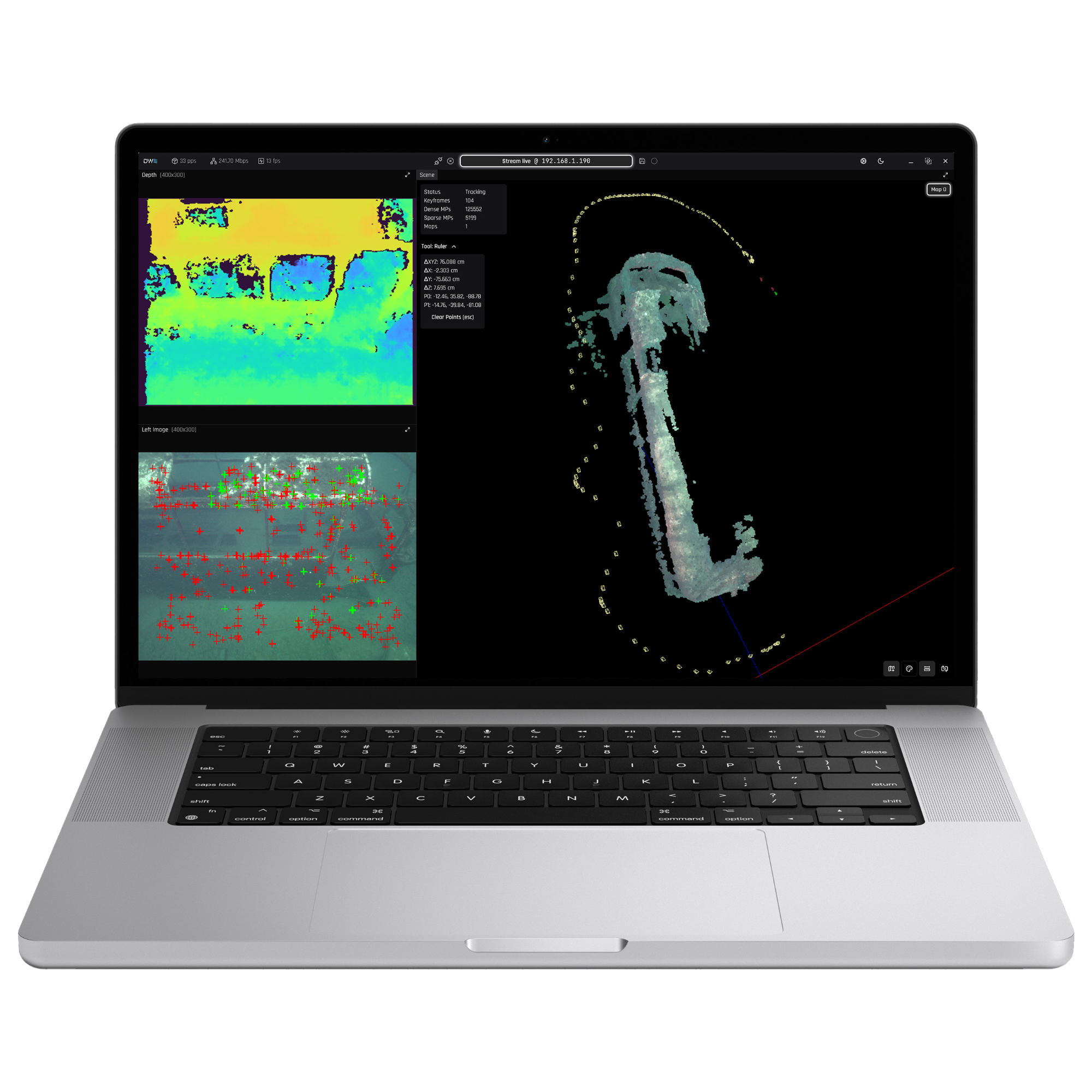
The intelligence layer for the explore3D stereo vision camera. DeepWater Desktop converts synchronized video streams into survey-grade spatial data, providing ROV operators with real-time depth perception and tracking for surveys and inspection in GPS-denied, underwater environments.
3D Asset Reconstruction: Utilizes subsea VSLAM for live mapping, allowing operators to visually track exact scan coverage so you know exactly what has been captured.
Real-Time Depth Perception: Generates high-density, 30+ FPS point clouds and depth maps fore accurate live measurements and autonomous navigation.
Extensible SDK Framework: Provides development tools to pipe processed spatial data into your navigation and machine learning stacks.
DeepWater Discovery
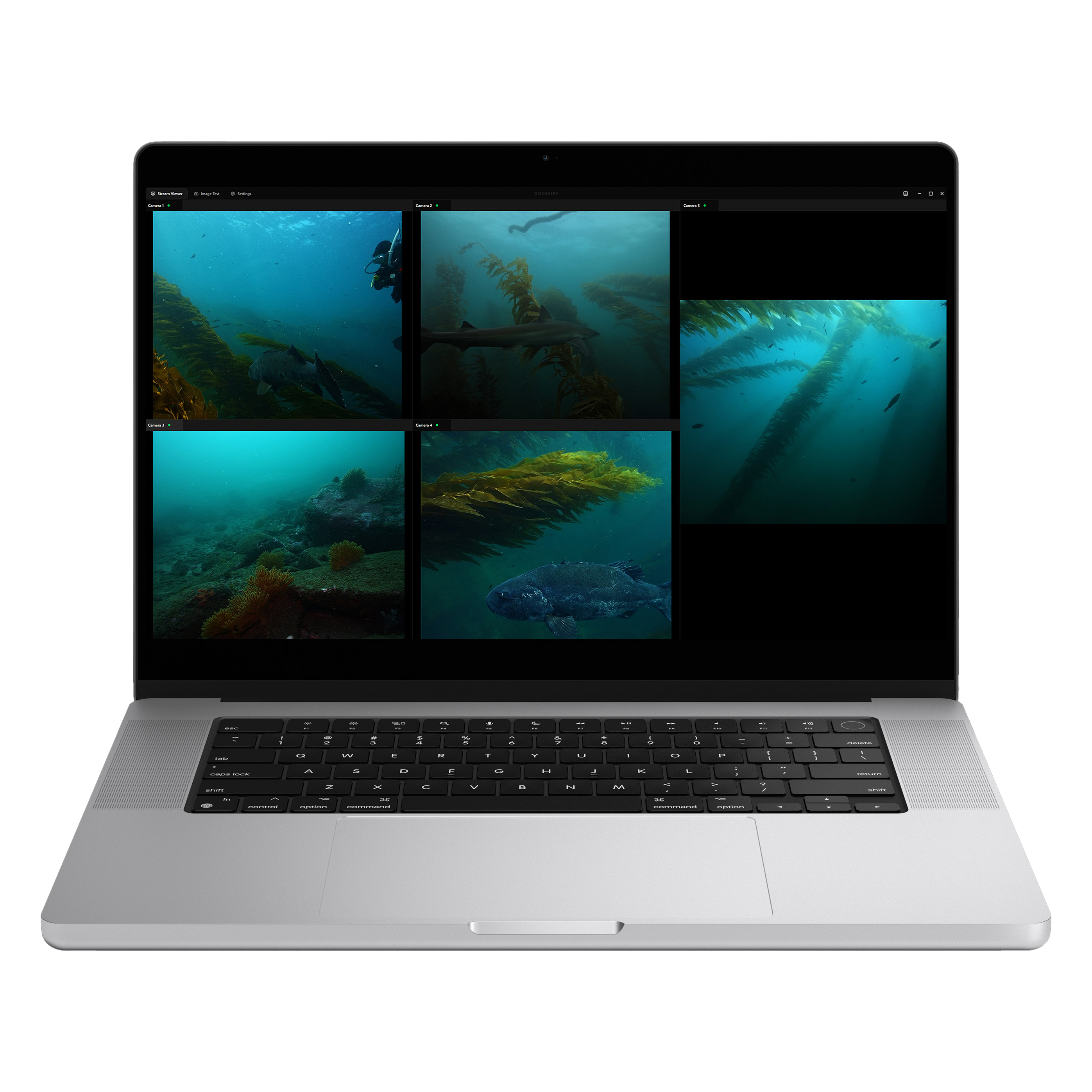
Streamlined, low-latency viewing and recording application built specifically for tethered underwater operations. Designed for operators who need instant situational awareness, DWE Discovery aggregates multiple camera viewpoints into a clean, unified dashboard.
One-Click Capture: Instantly record all video streams or take simultaneous snapshots from an intuitive dashboard.
Low-Latency Situational Awareness: Monitor multiple live feeds with under 60ms latency to ensure precise visibility during tethered operations.
Universal Camera Management: Gain real-time control over individual sensor configurations, white balance, and advanced video parameters on the fly.
dweOS
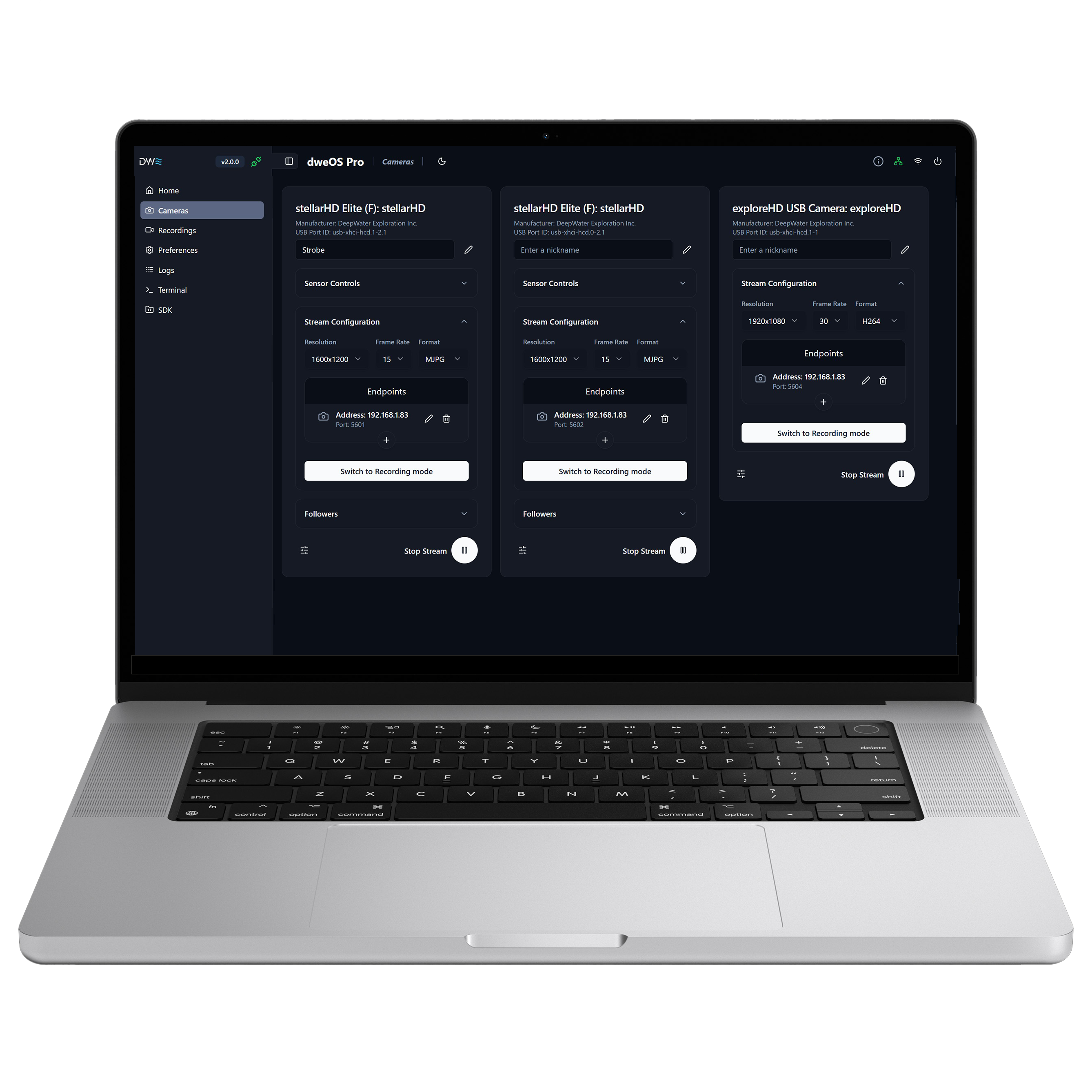
A lightweight, open-source configuration layer built for teams to effortlessly integrate DWE camera feeds into existing vehicle software stacks. dweOS streamlines camera management, allowing developers to quickly adjust parameters to optimize video streams.
Bandwidth Optimization: Dynamically adjust bitrates, frame rates, resolutions and more, through the UI or code directly, to optimize your camera arrays.
100% Offline Reliability: Runs entirely on your vehicle's edge hardware, ensuring full functionality during underwater missions without any external dependency.
Open-Source Adaptability: Completely transparent codebase, allowing your team to modify the software for your mission requirements.